A Simplified Inverse Kinematic Approach for Embodied VR Applications
Daniel Roth, Jean-Luc Lugrin, Julia Büser, Gary Bente, Arnulph Fuhrmann, and Marc Erich Latoschik
In: Proceedings of the 23rd IEEE Virtual Reality (IEEE VR) conference 2016
Abstract
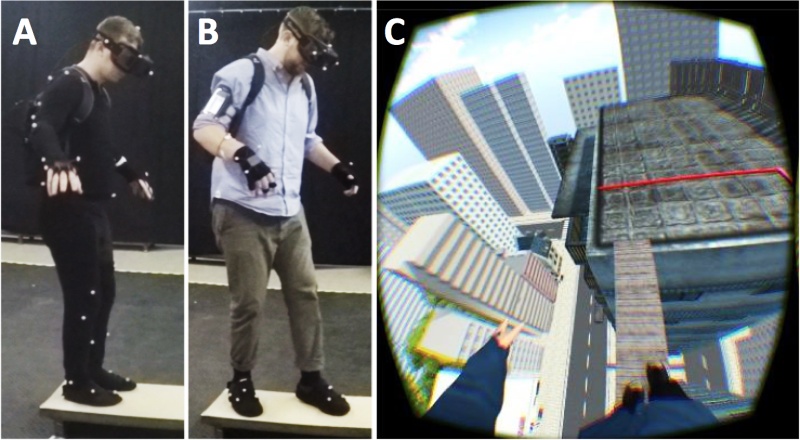
In this paper, we compare a full body marker set with a reduced rigid body marker set supported by inverse kinematics. We measured system latency, illusion of virtual body ownership, and task load in an applied scenario for inducing acrophobia. While not showing a significant change in body ownership or task performance, results do show that latency and task load are reduced when using the rigid body inverse kinematics solution. The approach therefore has the potential to improve virtual reality experiences.
Paper
Project page on Research Gate:  Link
Link
Award
The paper was awarded as best poster at the IEEE Virtual Reality conference 2016.